Hermes-01 Project Brief
Hermes-01 is a humanitarian payload rocket concept that delivers urgent medicine to clinics cut off by conflicts or disasters. Open hardware, intelligent routing, and a rapid deployment workflow keep responders safe while expanding the reach of aid logistics.

Humanitarian reach
Designed to push critical medicine into conflict disrupted zones without risking delivery crews.
Integrated avionics
Arduino based control, GPS telemetry, servo actuation, and mission UI operate as one responsive stack.
Autonomous guidance
Node based trajectory planning and fin control algorithms adapt to weather and shifting winds.
Recognized progress
Vakkanjers Explorer national finalist with a second place finish supporting ongoing development.
Humanitarian Mission Brief
Hermes-01 responds to medicine shortages in conflict regions where supply lines collapse overnight. Remote Ukrainian clinics highlighted the need for a responsive platform that can depart from a safe standoff location and land within a narrow relief corridor. The mission profile emphasizes civilian protection, rapid deployment, and post-impact retrieval that preserves sterile payloads.
By pairing precise delivery with secure launch operations, the concept gives humanitarian teams a controllable option when roads, bridges, and airstrips are compromised.
Integrated System Architecture
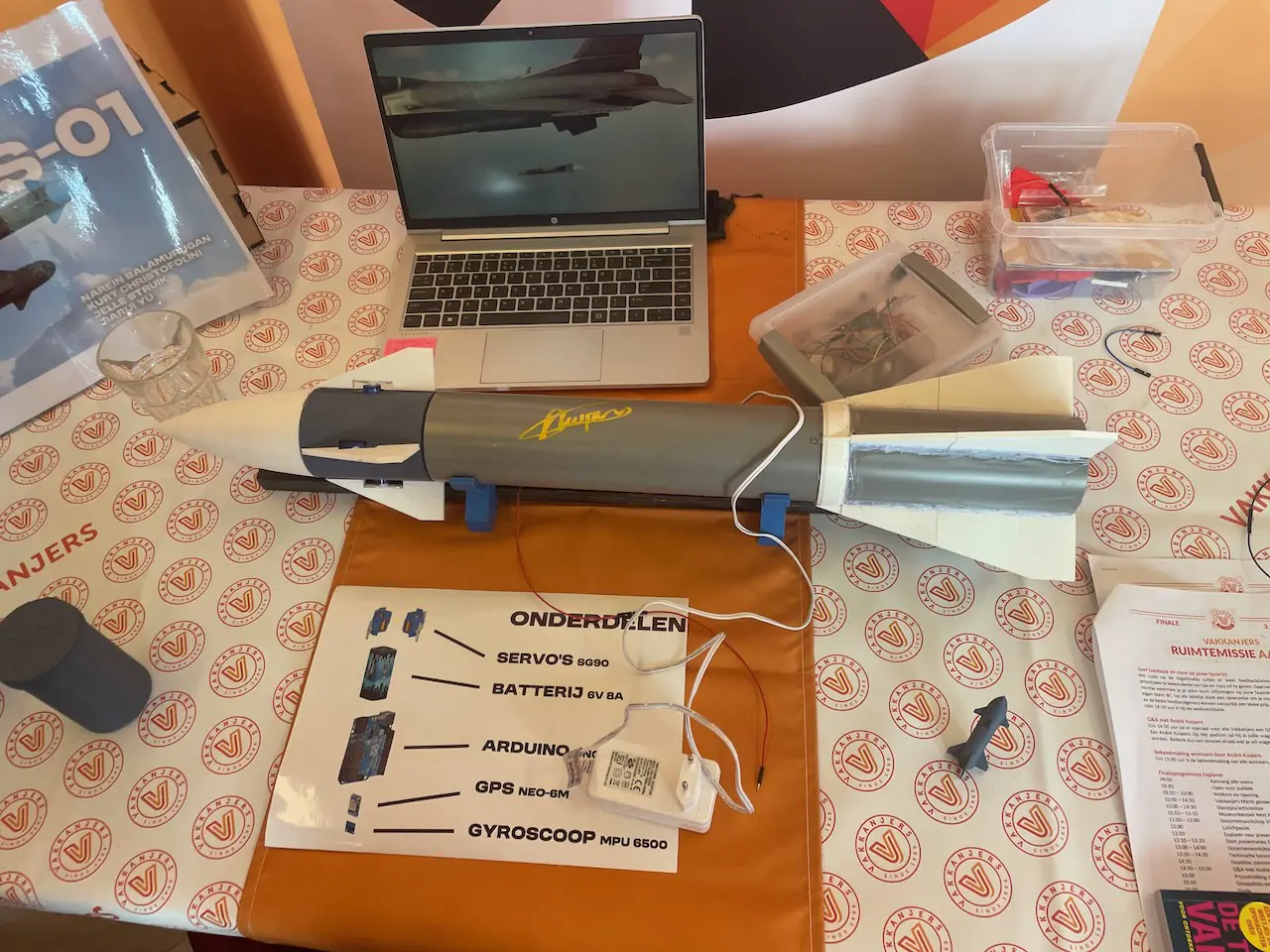
The prototype integrates hardware and software into one modular stack that teams can replicate globally. A PVC fuselage and 3D printed airframe components keep fabrication costs low, while off-the-shelf electronics simplify repairs and scaling.
- Hardware stack: Arduino Uno R3 flight computer, Neo-6M GPS, MPU6500 gyroscope, and quad SG90 servos work in sync with satellite links for telemetry and control.
- Software workflow: Custom UI mockups, telemetry dashboards, and weather feeds support launch go-no go decisions and post flight analysis.
- Fabrication approach: PLA prints, PVC tubing, and supermarket D-cell battery packs allow low cost assembly in resource constrained labs.
Simulation and Autonomous Control
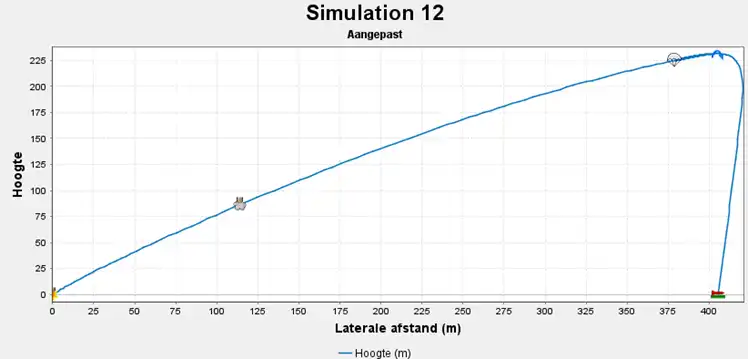
Trajectory planning is driven by simulation before a single launch occurs. OpenRocket studies established a 400 meter baseline with a conservative motor, while additional physics models explore higher energy stages. Virtual nodes map a parabolic flight path and give the control system waypoints to chase, allowing live course correction as winds shift.
Fin actuation follows our custom Dynamic Angle method (as how we call it), scaling servo movement with airspeed to balance responsiveness and stability. The same algorithms feed into the mission UI so operators can audit every autonomous decision.
Human Centered Safeguards
The team validated visual identity choices with Ukrainian contacts who will view the rocket from the ground. Feedback from Vlad, a person living in Ukraine, who we found on Discord, confirmed that an orange parachute and red cross markings communicate relief rather than risk. Our own color detection testing backed the decision by showing the orange parachute is spotted faster than green, white, or red. Failsafe bypass codes ensure only authorized responders can trigger a launch, reducing the risk of misuse in volatile regions.
These measures keep the concept rooted in trust, clear intent, and civilian safety even as it operates autonomously.

Evidence and Next Steps
This is what we would do if we have more time to perfect it: Bench testing showed three of four servos hitting targets, flagging one unit for replacement. Satellite link checks confirmed GPS handshake reliability, and mock telemetry runs streamed speed, altitude, and weather data for post mission review.
- Immediate actions: swap the failed servo, expand hardware-in-the-loop testing, and finalize the parachute visibility package.
- Midterm goals: Create and manufacture our own PCB wiring for release, migrate simulations into the mission UI, and stage a guided drop rehearsal.
- Recognition: the project earned second place in the Vakkanjers Explorer national finals.
