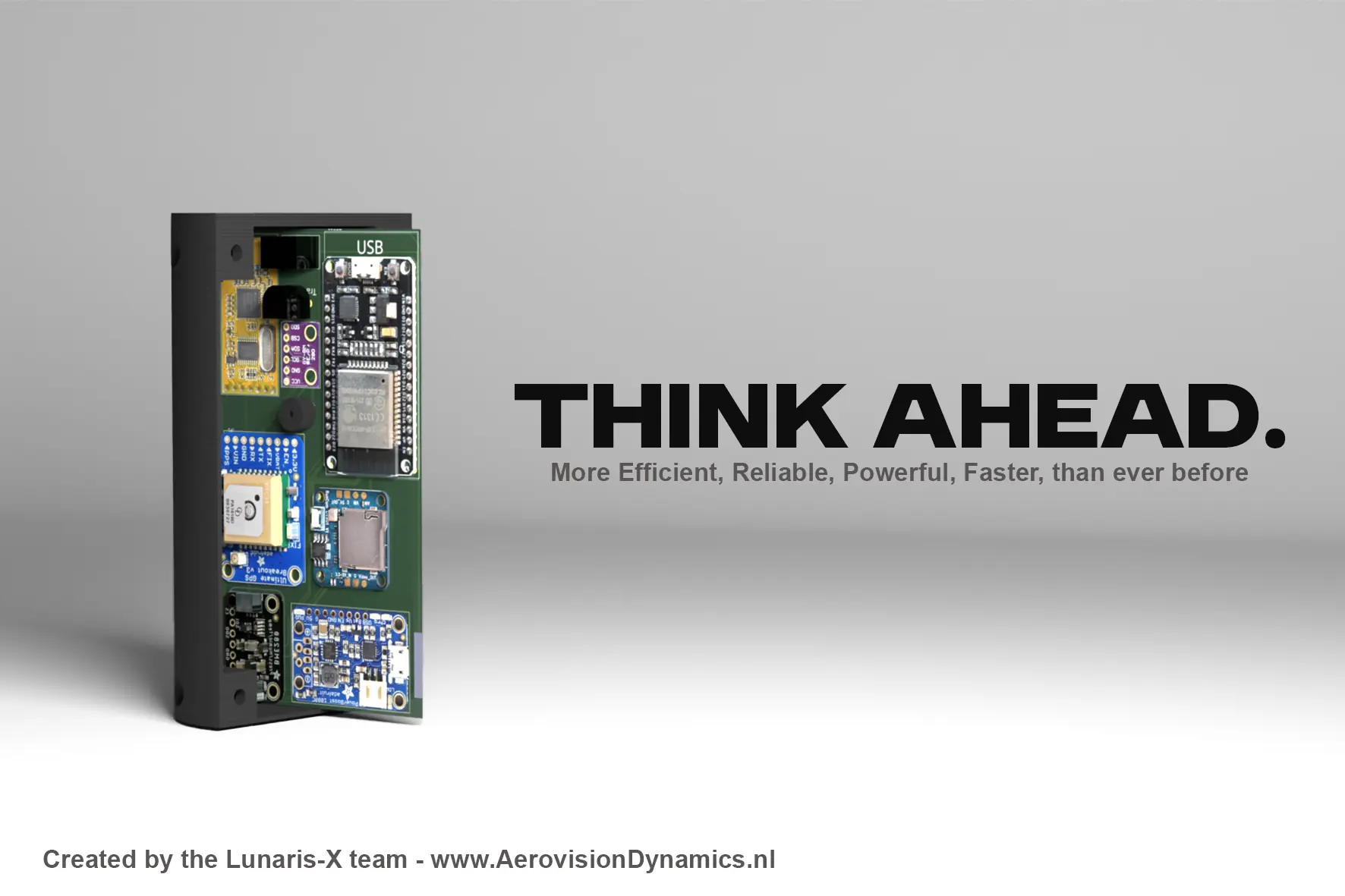
Lunaris-X
By team Aerovision Dynamics
█
Lunaris-X CanSat
Primary mission: Use the BMP280 sensor to measure temperature and air pressure. Air pressure can be calculated to accurately determine altitude.
Secondary mission: Use a custom Python script to convert raw data into keyframes, then apply a machine‑learning LLM algorithm to smooth out imperfections and fine‑tune the data as an additional calibration step after receiving it.
Reliability
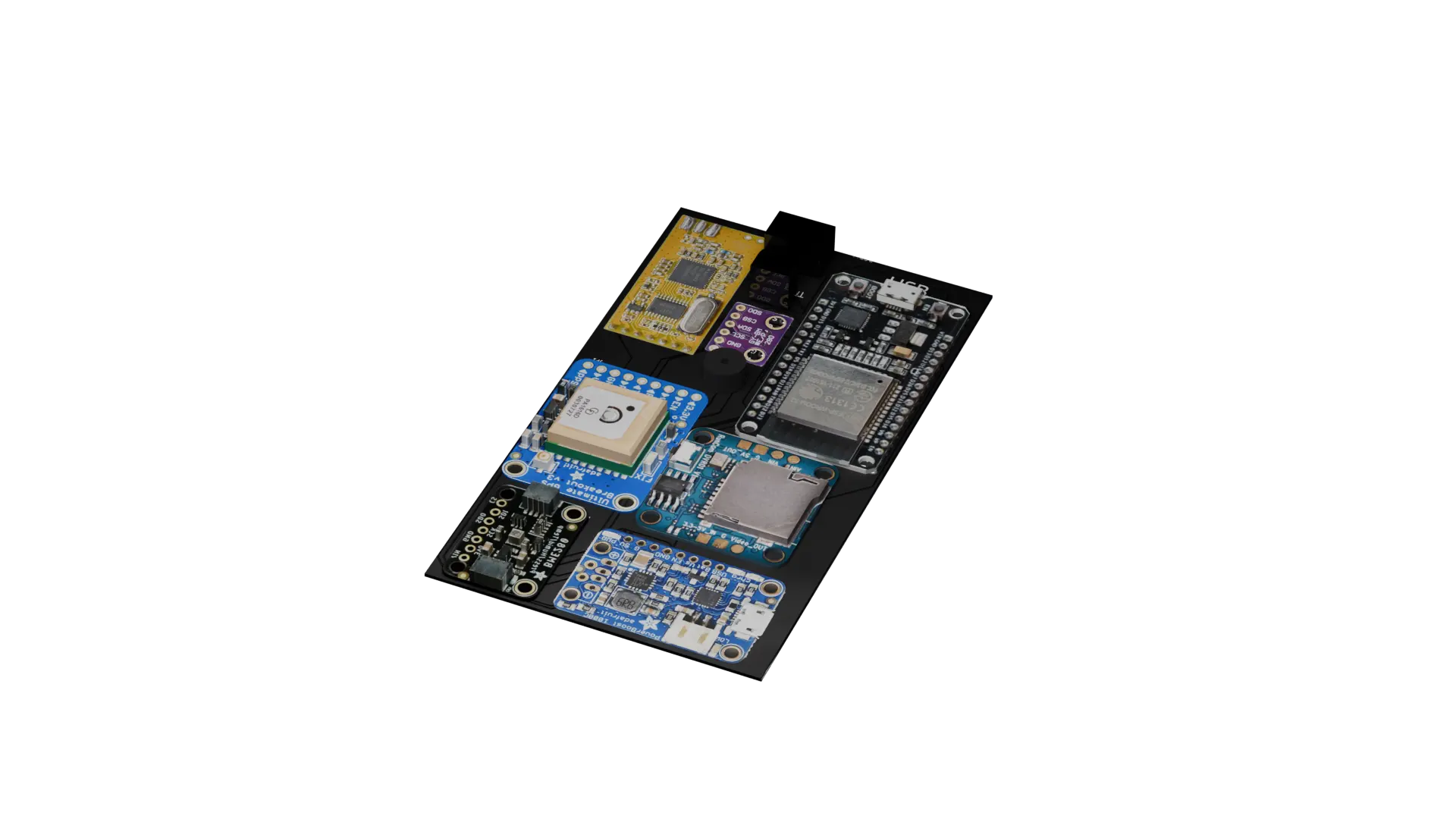
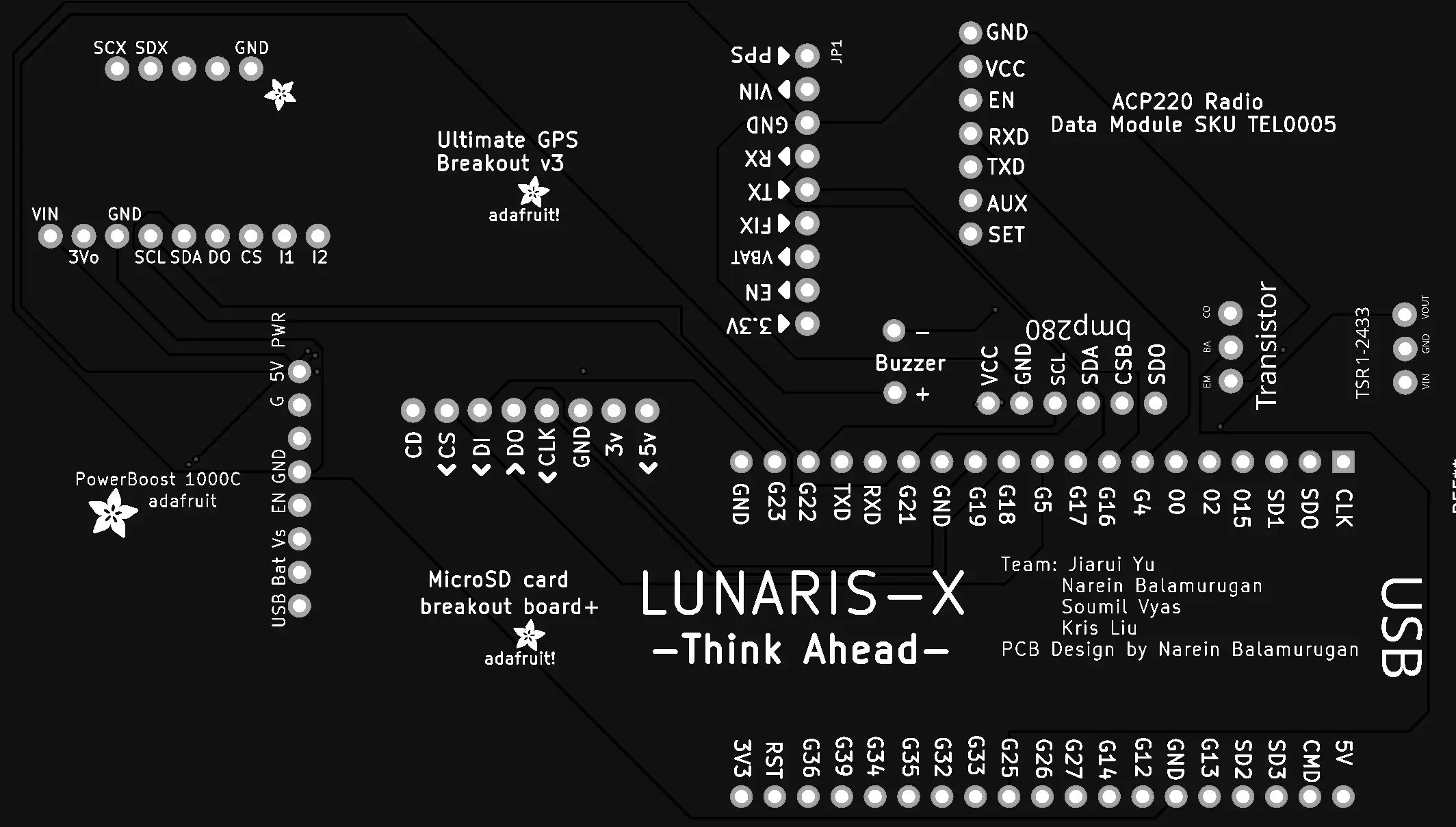
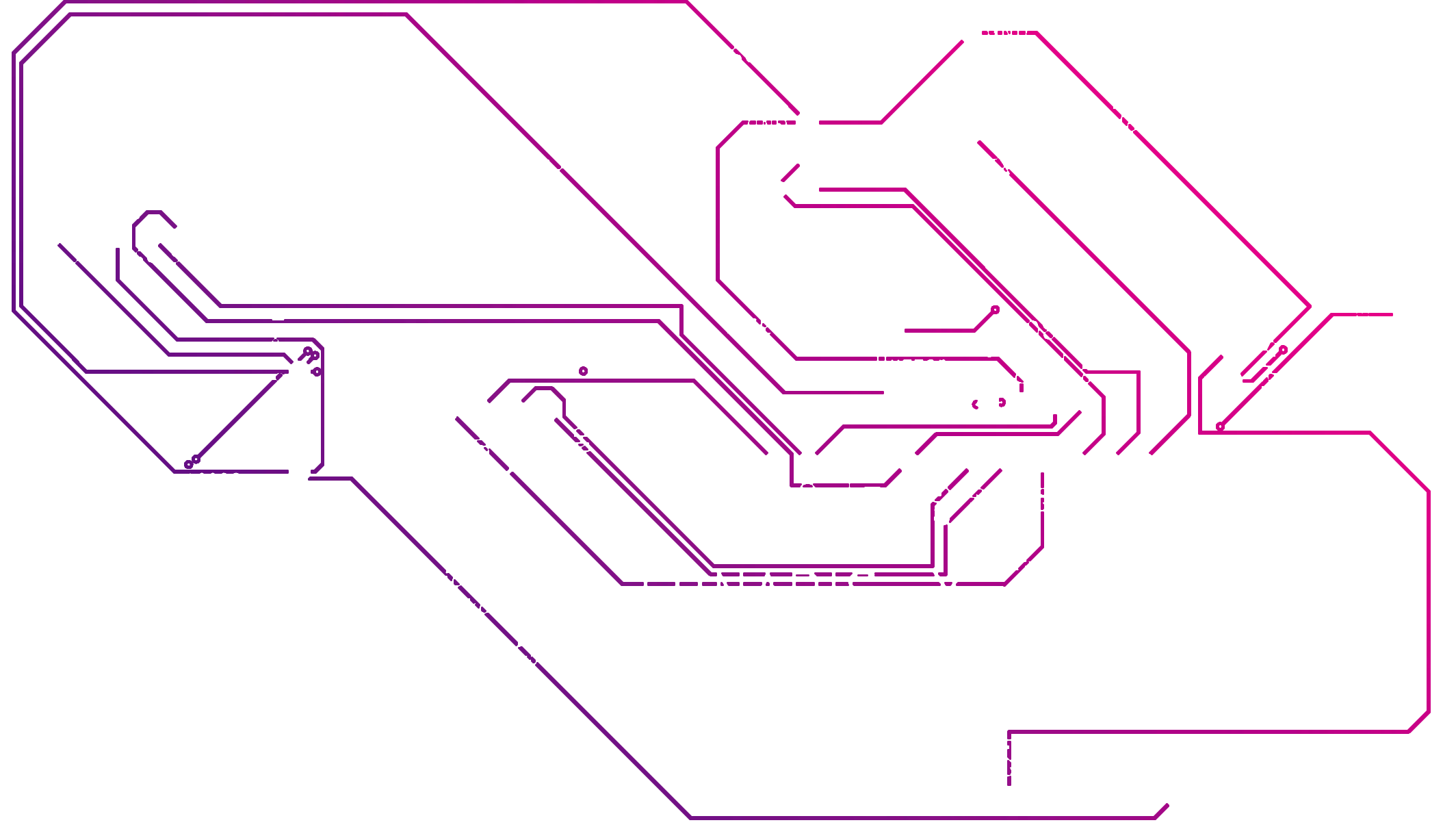
Custom PCB
Custom designed circuit board with carefully soldered joints using the Nan Ya NP-140F as material with 0.05-0.10% moisture absorption. Extremely resistant against forces and vibrations.
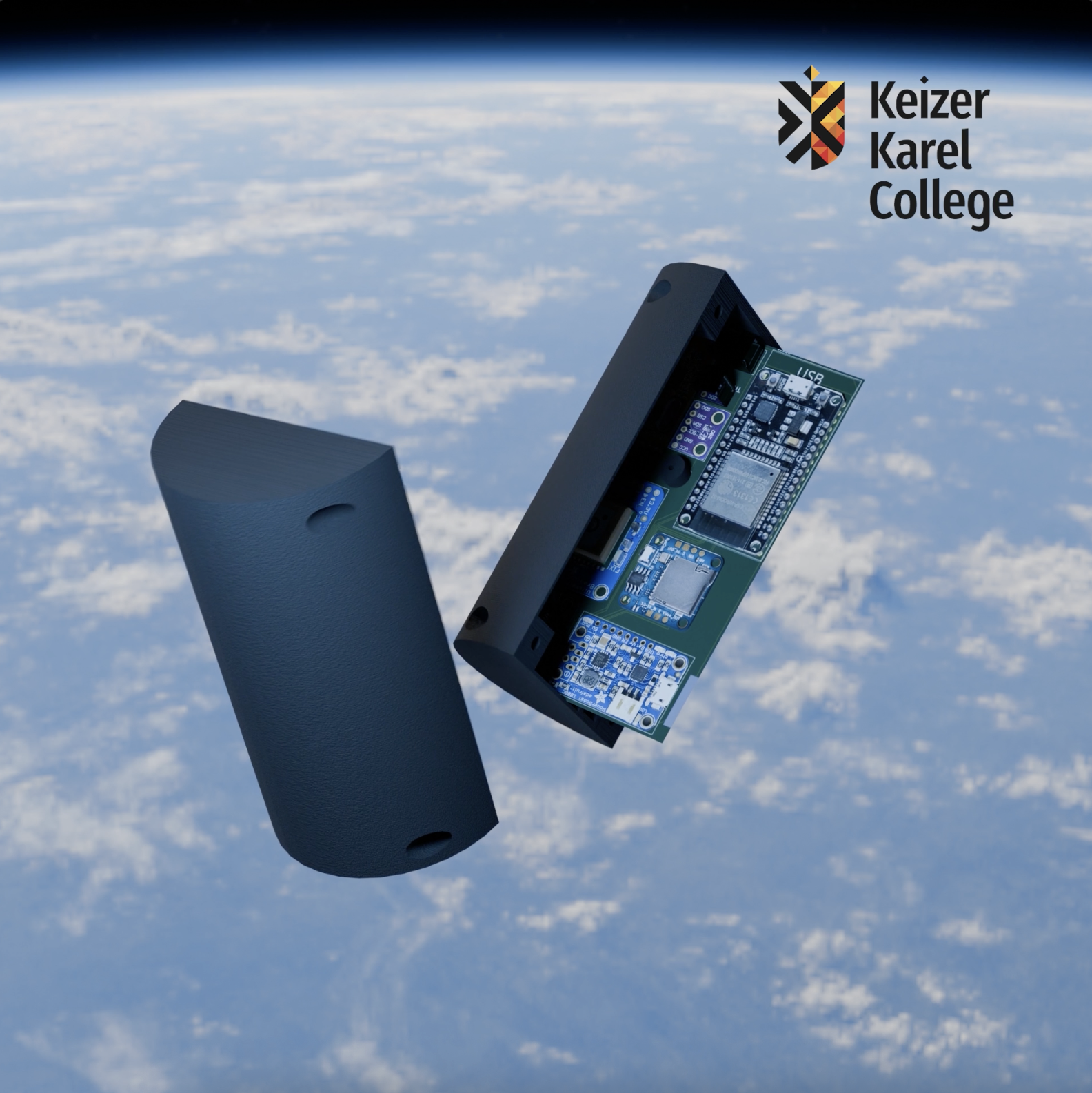
Airframe
Reinforced Airframe
Airframe designed with thick layer walls. Outer layers are designed with pure durability in mind, unused space internally is filled with impact absorbing infill.
Proven durability
Advanced stress testing methods
Vibration and G-force tests simultaneously performed by our custom test vehicle. Other tests include shock loads and drop tests.
Built, not bought
Custom designed 8.8dbi Yagi antenna
The ground station features this custom purpose-built antenna, proven to reliably recieve signals from the quarter wave antenna up to 1km under heavy vibrations.

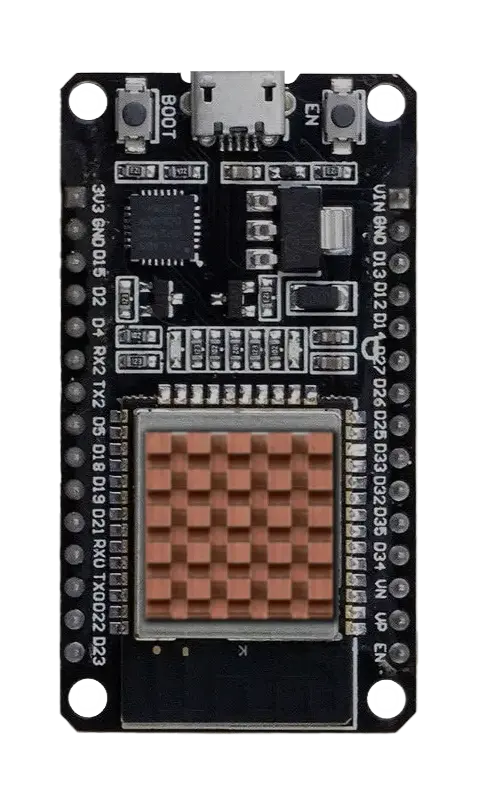

On-board computer
ESP32 vs Arduino Uno R3
CPU + clock
ESP32: dual‑core 32‑bit @ 240 MHz • Arduino Uno R3 (ATmega328P): 8‑bit @ 16 MHz
Memory
ESP32: 520 kB SRAM • Arduino Uno R3: 2 kB SRAM
Flash storage
ESP32: 4 MB flash • Arduino Uno R3: 32 kB flash
Connectivity
ESP32: native Wi‑Fi + BLE • Arduino Uno R3: no native wireless
Outcome
More compute headroom, higher‑rate sensing, and easier expansion without redesign.
Overbuilt circuit board
Our final product
Renders while the full CanSat lands.
From Instagram
Our socials




Technical highlights
Subsystems vs the ESERO reference kit
Sub-system
On-board computer
Key specification
ESP32 dual-core 32-bit @ 240 MHz, 520 kB SRAM, 4 MB flash
Advantage
15× raw CPU speed, 32× RAM and built-in Wi‑Fi/BLE vs the 8-bit 16 MHz ATmega328P Arduino Uno R3 in the reference kit; enables higher-rate sensing, complex filtering and future payloads without board changes.
Sub-system
Primary-mission sensing
Key specification
High efficiency BMP280 barometric/temp sensor. Calibrated for precision.
Advantage
Allows for estimation of altitude with precision.
Sub-system
Attitude & motion
Key specification
9-axis IMU (accelerometer + gyro + magnetometer) sampled at ≥60 Hz
Advantage
60× the minimum 1 Hz telemetry requirement. Recieves all data necessary to reconstruct the orientation with a visual flight path
Sub-system
Power architecture
Key specification
2000 mAh+ Li-Po (expandable) + high-efficiency switching regulator (1 A shared on 5 V & 3.3 V rails)
Advantage
Rechargeable design eliminates disposable 9 V blocks (cuts e-waste) and massively increases current headroom (Arduino Uno limit 50 mA on 3.3 V); supports power-hungry upgrades such as LTE/5G radios or cameras without redesign.
Sub-system
Mass & structure
Key specification
Carbon-fibre-reinforced PET-G airframe, custom PCB; ballasted to ≥300 g
Advantage
Rugged CF-PET-G shell keeps the stack light. Ballast is added to hit ESA’s ≥300 g minimum and optimise CG/stability without overstressing the airframe.
Sub-system
Data integrity
Key specification
Live 433 MHz radio down-link (primary) + mirrored logging to flash & Micro-SD (backup)
Advantage
Radio remains the primary way to communicate. Micro SD allows us to capture data during launch when the CanSat's radio waves are shielded by the metal rocket body.
Sub-system
Software stack
Key specification
MicroPython
Advantage
Instant REPL debugging and no compile cycle accelerate iteration and lower barriers for future student teams.
Sub-system
Recovery & safety
Key specification
Cross-form rip-stop parachute (0.072 m²) targets 7–8 m s⁻¹; piezo beeper auto-arms after 120 min
Advantage
Meets ESA’s recommended 8–11 m s⁻¹ descent range; audible beacon simplifies field retrieval.
Why Lunaris-X is ahead
Overbuilt platform for future CanSats.
- Next-generation architecture – departs from the Arduino-centric starter kit, leveraging a modern 32-bit Soc and custom PCB
- Sustainability by design – rechargeable Li-Po, reusable airframe and minimal wiring reduce consumables and waste while increasing reliability.
- Platform-ready for future CanSats – over-specced 1 A rails, spare GPIOs, native Wi‑Fi/BLE and MicroPython let new teams bolt on cameras, GNSS-RTK or cellular links without touching the hardware.
- Robust telemetry and logging – 433 MHz radio downlink as primary path, mirrored to flash/SD for data survival even if the signal drops.
Net result: A highly reliable, overbuilt and modern platform for future CanSats.